科學家們將壁虎腳上的毛放大了一萬倍,研發出仿生黏附材料。但是,想打造一款靈活的仿壁虎機器人,還涉及到多個方面的問題。二十年前,它整體效能較差,如今壁虎機器人甚至可以在垂直的玻璃表面爬行…
出品:格致論道講壇以下內容為南京航空航天大學教授戴振東
演講實錄:
各位觀眾大家好,我是戴振東,來自南京航空航天大學。我的專業是仿生學,就是把生物學和工程技術結合起來的學科。今天我給大家帶來的是【從壁虎到爬壁機器人】。
壁虎在我們的日常生活中隨處可見,在家裏、洞穴裏邊都能看到,是一個很好的仿生物件。但到了真正要做實驗的時候,我們發現很難抓到壁虎。

於是我們就在【揚子晚報】上登報征集,誰家有壁虎可以貢獻出來,我們做完實驗以後會把它們放生。

我們在南京找到了多疣壁虎,但是發現這種壁虎依然比較小。幸運的是,在我們國家的廣西、雲南有大壁虎分布和飼養。

這就是大壁虎的生存環境。

為了養好壁虎,我們模仿這樣的環境,建造了天然的實驗系統。
這是我們飼養的壁虎,圖裏的這只壁虎剛剛從右下角的那個蛋裏孵化出來。它做的第一件事情,就是把自己的爪子洗得幹幹凈凈。

這是它長大以後這樣的樣子。飼養壁虎的過程也不容易,壁虎也會生病。有一次它得了口角炎,但我們沒有對應的獸醫,只好請我的夫人來給壁虎看病,她是皮膚病研究所的醫生。
「毛茸茸」的腳抓得牢
我們都知道結構決定功能,那麽壁虎腳上的結構到底是什麽樣子?
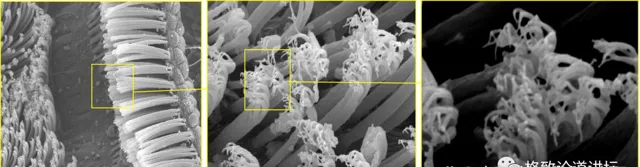
這就是南京的多疣壁虎的腳,它腳上的剛毛從500倍、5000倍到1萬倍逐步地放大。結構上是一根剛毛在末端分成了好多小的鏟狀絨毛分支,而每一個小末端都小到了我們頭發絲的千分之一到百分之幾。
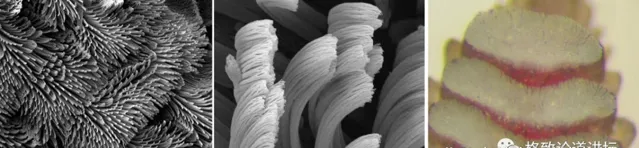
這是大壁虎腳上長的剛毛,中間這張實際是放大2000倍的樣子,結構也是非常小。
我們進一步看一下壁虎腳上的毛在腳趾頭上是怎麽長的。這是我們用X射線繞射(X-ray Diffraction,XRD)做的效果,模擬了壁虎腳趾上面叫做皮瓣的細長結構。皮瓣上白白的就是它的毛。壁虎正是靠著這樣一些毛茸茸的東西,使自己能夠吸附在各種各樣的表面上。
這個視訊演示了壁虎爪子的4個指頭是怎麽樣抓上光滑的玻璃的。人的手指做不到外翻,但壁虎的手指會先外翻,然後把5個指頭內收,從而牢牢地抓到天花板上。壁虎想要脫附的時候會外翻手指,想要黏附的時候就內收。
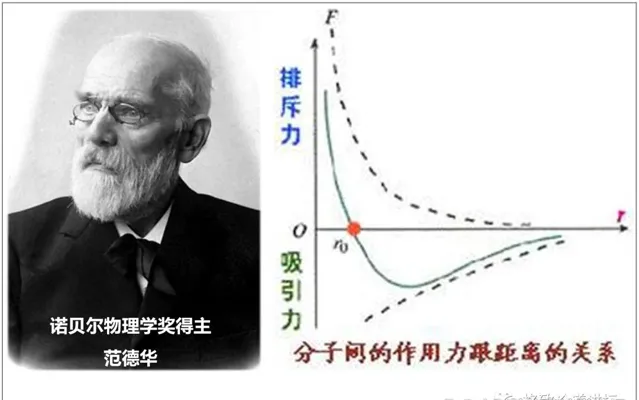
那這個黏附過程是依靠什麽樣的力學機制呢?在這裏,我們必須提到一個叫範德華的諾貝爾獎獲得者。範德華先生在研究液體凝固的過程中發現了範德華力。
範德華力的細節比較復雜,簡單地說就是,分子離得非常近的時候,物體間就會產生一種排斥力。分子之間離得很近的時候產生的是排斥力,而且排斥力隨距離接近增加得非常快;但是離得相對比較遠的時候,反而會產生一個吸重力。
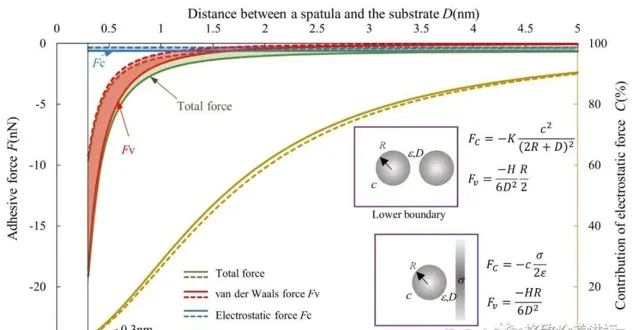
這張圖體現了範德華力和靜電力是怎麽交互作用的。當兩個分子表面的距離非常小,小到我們頭發絲的萬分之一,也就是大概一個奈米的時候,形成的範德華力要比靜電力要大很多。
有了範德華力作為理論基礎,我們接下來要做的就是做出像壁虎一樣很細很細的毛。
制造仿壁虎黏附材料
我們有2個技術路徑,其中一個就是用碳奈米管制作,可以用垂直徑向生長的碳奈米管來實作這樣的功能。但是不幸的是,目前這項技術還難以實作產業化套用。

▲左:德國公司的仿生黏附材料
中、右:在南京市溧水區支持下研制的黏附材料
左邊這個圖,就是由我在德國時的合作導師擔任技術指導的公司做出的仿壁虎黏附材料,中圖和右圖是我們團隊在南京市溧水區的支持下研制的仿生黏附材料。大家看到的這個已經放大了很多倍。
我給大家簡單地講一下制作方法。我們使用的模具是金屬的,需要在1平方厘米以內打6萬個到20萬個孔,然後把高分子材料註進去,而且還要給每一個孔裏邊修出一個喇叭口來。
有了這樣的結構,就可以來看它如何套用。
仿壁虎黏附材料可以套用於航天員訓練。在軌失重條件下,航天員們存在骨流失等問題,需要進行一定的鍛煉。
另外,航天員們在太空中時還做著各種各樣的工作,也都需要鍛煉。伸肌的鍛煉比較好做,屈肌的鍛煉以前一直沒有辦法做。
我們在地球上擡腿的時候,因為有重力,所以擡腿時需要用力,這樣就能使肌肉得到鍛煉。但是在微重力環境下,擡腿不需要使太大的力氣,就沒有辦法鍛煉。

▲全球第一個實作失重環境下
屈肌鍛煉的裝置:仿生黏附鞋
於是我們研制了仿生黏附鞋。航天員穿上這個鞋子,擡腿的時候就會對肌肉產生刺激,能夠得到很好的鍛煉效果,這樣就可以做屈肌訓練了。
▲合作研發用於失重條件下的黏附材料
那麽仿壁虎黏附材料在微重力環境下還有沒有其他套用呢?這是我們和北京紫微公司合作,用失重飛機做的模擬。我們在10秒鐘完全無重力的情況下,做了一個黏附實驗。實驗證明在完全失重情況下,仿壁虎黏附材料可以產生非常好的黏附力。
這是另一個實驗。我們用氣浮台把兩個200多公斤的東西浮起來,以此模擬微重力的環境,通常情況下這兩個東西碰撞接觸後會分開,但是用了仿生黏附材料的物體後,它們在相撞之後結合成了一體,還可以被拉著跑。
這樣的黏附材料就可以用於太空。如果軌域上有一個空間碎片,就可以用黏附材料把它抓住,讓碎片脫離軌域。甚至可以把這個碎片「廢物利用」,作為空間制造的材料。
適應各種環境的仿壁虎機器人
那是不是有了仿壁虎材料,壁虎機器人就可以被很輕易地制造出來了?實際上,仿壁虎機器人比我們想象的要復雜不少。
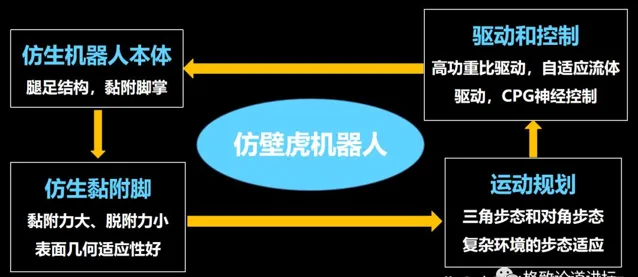
仿壁虎機器人涉及到好幾個方面的問題。機器人的各個機構就像我們人的關節,我們要考慮它是一個什麽樣的結構。最重要的是,我們要考慮如何制造仿壁虎機器人的腳。
然後就是考慮機器人要怎麽運動。因為它是一個四足的腿式機器人,運動時有多重步態,包括三角步態和對角步態等等。三角步態就是三個腳落在地上,一個腳走;對腳步態就是兩個腳在支撐狀態,另外兩個在走。我們需要調和它在復雜環境下的步態。
除此之外,還涉及到驅動和控制,包括過驅動的問題。這四個部份的研究總體上是一個螺旋式上升的問題。
為了解決這個問題,我們要學習和研究壁虎到底是怎麽運動的。這三個圖分別是壁虎在天花板、墻及地面上跑步時的行為學。
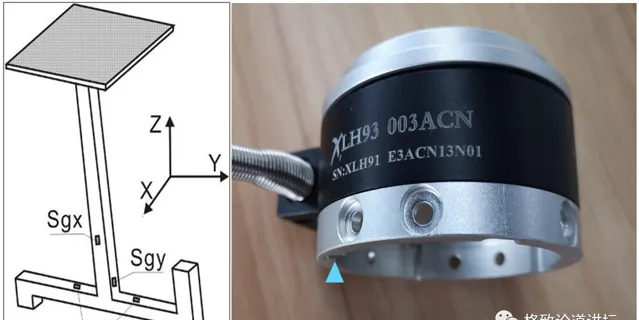
這是我們為了研究壁虎怎麽運動研制的全球首台多維力傳感器。我們後來已經把這個多維力傳感器做成了一個產品,實作了產業化。
視訊中從左向右分別是壁虎在天花板,墻及地面上運動反力的規律,也就是壁虎在天花板、墻和地面上的力學控制模式。知道了壁虎在各種情況下怎麽受力,我們在做機器人的時候就可以用同樣的規律來控制。
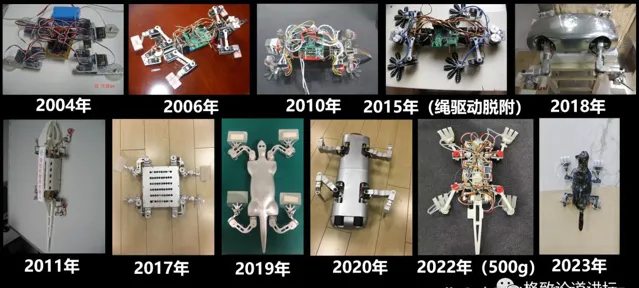
經過20多年的研究,我們團隊做出了一系列的壁虎機器人,2004年的這個機器人長得又醜,跑得又慢,到30°的傾面上就會滑下來。而2023年做的這個壁虎機器人無論在粗糙或光滑的表面都可以運動,可以在墻上運動,甚至還可以在天花板上運動。
這是我們的幾款仿壁虎機器人。最左邊的機器人正在一個垂直的玻璃表面爬行,而且這個時候機器人只有一個爪黏附著。中間的機器人有4個爪,黏附在一個模擬空間站的表面。最右邊這個機器人在凹形的表面黏附著。如果是在一個凸形表面運動,它可以透過使勁增加一點法向力,讓自己執行起來更加的方便。但是如果是凹形表面的運動會更加困難。經過幾年的研究,我們也讓機器人實作了在凹形表面黏附的功能。
▲左:仿壁虎機器人墻面運動
中:實作光滑面快速黏附攀爬
右:實作不同粗糙面上運動
這分別是仿壁虎機器人在垂直的墻面、光滑面和不同粗糙面上的快速運動。最右邊這個圖中的不同的顏色表明這兩個表面的粗糙度是不一樣的。
為了讓仿壁虎機器人能在全空間運動,像壁虎一樣能夠在各種表面之間過渡,我們做了大量的模擬和分析。
▲左:墻角過渡仿真
右:天花板上黏附爬行
左邊是壁虎怎麽樣從地面上爬到墻上的仿真圖。我們先觀察了壁虎是怎麽做的,然後仿照壁虎,規劃機器人應該怎麽做。右邊是仿壁虎機器人在模擬天花板上的攀爬。
我們想看這個技術能不能解決我們工業和日常生活中面臨的問題,比如柔性搬運上面。這個仿生柔性機械臂可以搬像聖女果一樣很小的東西,還可以搬運雞蛋這樣比較脆弱的東西。生雞蛋很容易碎,但是在抓取時不需要力控,抓到就能走。因為仿生柔性爪本身的法向力很小,接觸很溫柔,就可以輕易地把它抓走。同時,各種各樣的水果,重的、輕的,包括軟的東西,都可以被抓起來。
這是我們最近研制的仿壁虎機器人,它的爪子可以做到主動黏附和主動脫附,這樣會使它的工作更加可靠。
這個也是我們做的一個仿壁虎機器人,它正在一個模擬空間站表面的裝置上面橫著爬,未來可以用於空間站檢測。
仿生術的更多套用
那麽,未來仿壁虎機器人還可以做些什麽?

▲仿生黏附捕獲裝置變廢為寶
這是一張空間碎片繞地球的分布圖。現在我們有數億個一厘米以上的碎片在繞著我們的地球執行,已經有若幹個衛星被碎片撞擊,我們的中國空間站也曾受到過碎片的幹擾。那麽能不能把碎片變成一個資源,用我們發明的這樣一個技術把它抓起來變廢為寶呢?
除了解決太空碎片問題以外,空間站在遠端的一些裝置和部件,很難被機械臂夠到,航天員也很難去對它進行檢測,或者對一些運動部件加註油。我們研發的這些技術可能也會對空間站裝置檢測和部件維護起到一些積極作用。

人類從大自然得到的啟發不僅僅來源於壁虎,日常生活裏實際上還有很多例子。比如在荷花盛開的時候,我們總看到清清爽爽的荷葉。基於荷葉效應,人們研發了自清潔塗料,塗上自清潔塗料以後,一陣雨過,馬上就會幹幹凈凈。
同時我們註意到了鳥的飛行,於是發明了飛機。現在我們研發的飛機可以飛得比任何一只鳥都更遠、更快、更高。目前我們的飛機還沒有做到像鳥兒一樣安全,這個是未來會實作的一個夢。
最右邊很漂亮的這張圖,實際上是個蜻蜓的腦袋。蜻蜓的神經系統相對簡單,但是它可以比我們人的雙目快10倍發現目標,在飛行的過程中抓住蒼蠅把它吃掉。我們從蜻蜓的復眼中得到啟發,發明了ATR視覺感應器和復眼相機。
自然讓我們產生無窮的遐想,給我們巨大的、深邃的思想啟示。希望各位年輕的朋友和老朋友們能夠在自然的啟發下創造出更多的奇跡。

謝謝大家!
「格致論道」,原稱「SELF格致論道」,是中國科學院全力推出的科學文化講壇,由中國科學院電腦網路資訊中心和中國科學院科學傳播局聯合主辦,中國科普博覽承辦。致力於非凡思想的跨界傳播,旨在以「格物致知」的精神探討科技、教育、生活、未來的發展。獲取更多資訊。本文出品自「格致論道講壇」公眾號(SELFtalks),轉載請註明公眾號出處,未經授權不得轉載。











