螞蟻,一直都是數學題裏的常客,因為它總需要從A點走到B點,然後計算它的最短行走距離,它可以走在一個立方體上,也有可能是兩個立方體上,還有可能是圓柱體上……
不管怎樣,解題的前提是建立在螞蟻走直線的前提下,可現實裏的螞蟻真的會走直線嗎?在回答這個問題之前,我們先得把話題移到沙漠上。
沙漠是最容易迷路的地方之一,除了沙子和太陽,幾乎沒有視覺線索來作為導航依據。大部份地形看起來相似,這使得辨別方向變得困難。
更別說沙漠中還有大風,吹起的飛沙不僅會改變地形還會遮擋視線。風沙還可能掩蓋行走的痕跡,使人難以找到返回的路徑。
但對於生活在突尼西亞廣袤的鹽原上的長腳沙漠螞蟻來說,找到路就是家常便飯的事,畢竟找不到路就沒法在沙漠裏生存,早滅絕了。它們一般都會單獨行動,獨自出門找一些昆蟲的屍體作為食物。有時覓食的距離可以達到幾十米甚至上百米。找到食物後用顎咬住拖到巢裏。

正在拖行蜘蛛屍體的長腳沙漠螞蟻
圖片來源:Harald Wolf
那它們是怎麽找到回家的路呢?
早在2000年,哈拉爾德·沃爾夫 (Harald Wolf)就開始研究沙漠螞蟻的導航了。那時候,沃爾夫就發現螞蟻回家的路幾乎不會是直線的。
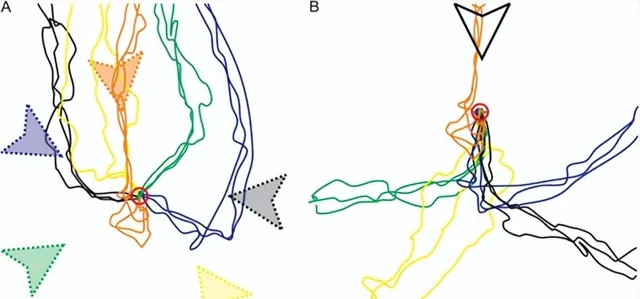
實驗記錄下5只沙漠螞蟻在接近食物源時的行走軌跡,紅色圓圈表示食物點的位置,可以看到這些螞蟻的路徑並非直線
圖片來源:參考文獻1
科學家發現,不管是沙漠螞蟻頭朝前走時,還是拖著食物往後走時,螞蟻都會呈現出塗鴉式的彎曲軌跡(下圖),幾乎找不到章法,只不過朝前走時,路徑線條看起來稍微順滑一些。
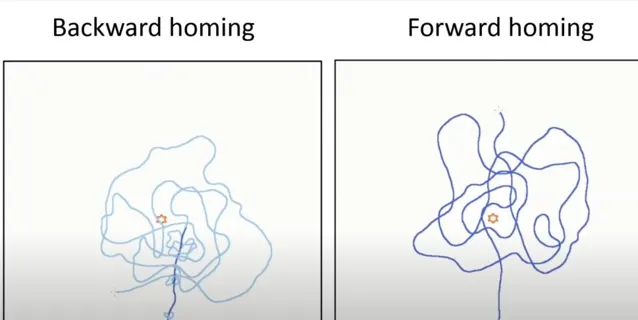
塗鴉式的彎曲軌跡
圖片來源:Harald Wolf
根據這篇文章的研究結果,沙漠螞蟻能夠有效地結合視覺和氣味線索來定位食物來源。這只是一開始的試驗結果,經過20年的不斷研究,沃爾夫發現沙漠螞蟻的導航能力十分復雜,不只是簡單的視覺線索和氣味線索,還有路徑積分和太陽導航。
路徑積分是最主要的導航方式,我們可以把這個過程想象成一種「螞蟻GPS」。科學家是怎麽知道的呢?他們做了一個改變螞蟻腿長的試驗。他們給一部份螞蟻增加腿長,裝上「小高蹺」,使它們每一步邁得更大。還有一部份螞蟻則減少腿長,透過剪短螞蟻的腿,使它們每一步邁得更小。然後在實驗場地上鋪設沙子並記錄螞蟻的行走路徑。科學家觀察並記錄螞蟻從巢穴到食物點的行走軌跡。

透過高速攝影儀記錄螞蟻的路徑
圖片來源:Harald Wolf

被加長腿和減短腿短沙漠螞蟻
圖片來源:文獻4
科學家透過記錄螞蟻的行走方向和步數,計算出它們的總行進距離和方向。將螞蟻的所有行走路徑合成,得出它們返回巢穴的直線距離和方向。他們發現,當螞蟻的步長被改變時,它們返回巢穴的位置發生了變化。這表明螞蟻依賴步數和步幅來計算行進距離。
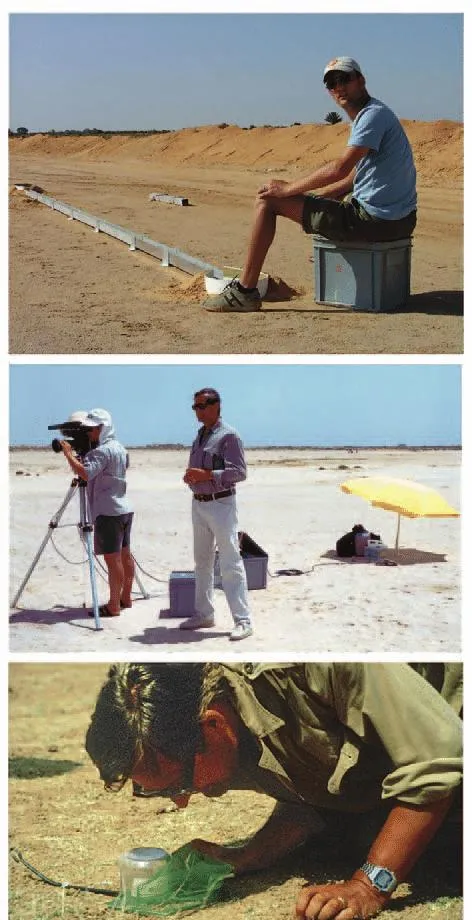
正在沙漠裏試驗的沃爾夫
圖片來源:參考文獻4
你可以想象一下有一只沙漠螞蟻從巢穴出發去找食物。它先向東走了50步,然後向北走了30步,最後向西走20步找到了食物。它的路徑像是一個「之」字形。現在它要回家了,它會計算出一個直接回家的路徑,這條路徑可能是先向南走30步,再向西走30步。
這也是沙漠螞蟻走不出直線的直接原因,多種導航機制的結合和交互作用導致螞蟻偏離直線。
在最新的研究中,科學家發現在一些情況下螞蟻的路徑不僅不是直線,而且是彎彎曲曲的,沒有規律,顯示出隨機漫步的特征,類似於布朗運動。

實驗場地
圖片來源:Harald Wolf
他們透過追蹤並記錄螞蟻尋找食物和返回巢穴的路徑,進一步測量路徑角度的變化。他們將螞蟻的路徑分成小段,每段約50厘米長,測量每段路徑之間的角度變化。例如,如果螞蟻先向東走,然後向北走,這兩個方向之間的角度是90度。
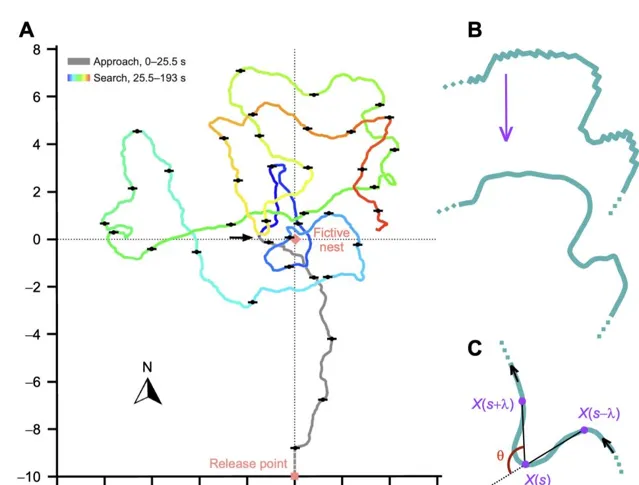
螞蟻從起點到終點的路徑
圖片來源:參考文獻2
之後,科學家對所有角度進行統計分析,計算出角度的平均值和分布情況。結果發現,這些角度在0到360度之間均勻分布,說明沙漠螞蟻的路徑是隨機的,類似於布朗運動。當然,沙漠螞蟻的布朗運動特征並非在所有搜尋行動中出現,而是主要在找不到目標時,它們會開始進行搜尋行為。此時,它們的行走路徑表現出明顯的布朗運動特征。
當接近目標時也就是快到巢穴和餵食點時,沙漠螞蟻的路徑才會慢慢走直。也就是說,沙漠螞蟻只要一出門,幾乎都是隨機的布朗運動,而在找到食物快到家門口時才會慢慢呈現出直線。
2019年,法國科學家受到沙漠螞蟻的啟發,設計出一種名為AntBot的機器人,這個機器人能夠在沒有GPS的情況下自主導航,並找到返回基地的路徑。這個機器人重2.3公斤,有六條腿,能夠在崎嶇不平的地形上移動。
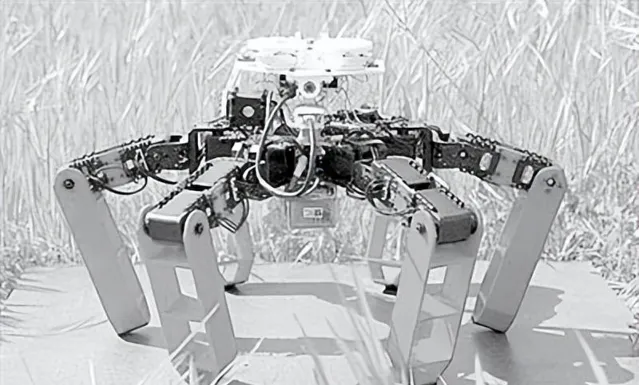
AntBot
圖片來源:sciencedaily
AntBot配備了一個光學羅盤,能夠感知天空的偏振光。這種羅盤可以在晴天或多雲的天氣條件下,以0.4度的精度測量方向。同時,機器人還裝有一個光流傳感器,用來測量相對運動。這種傳感器透過觀察地面紋理的變化來計算行進的距離。類似於螞蟻的路徑積分機制,AntBot也會計數它的步數,準確計算出走了多遠。
在實驗中,AntBot能夠在復雜環境中隨機探索,並精確返回起始位置,誤差不超過1厘米。沒想到吧,也許有一天,機器人不再需要GPS也能導航,而這一切的靈感都源於小小的沙漠螞蟻。
參考文獻:
[1]Wolf H, Wehner R. Pinpointing food sources: olfactory and anemotactic orientation in desert ants, Cataglyphis fortisJ. Journal of Experimental Biology, 2000, 203(5): 857-868.
[2] Wolf H, Baldy N, Pfeffer S E, et al. Geometrical multiscale tortuosity of desert ant walking trajectoriesJ. Journal of Experimental Biology, 2024, 227(10).
[3] Pfeffer S E, Wahl V L, Wittlinger M. How to find home backwards? Locomotion and inter-leg coordination during rearward walking of Cataglyphis fortis desert antsJ. Journal of Experimental Biology, 2016, 219(14): 2110-2118.
[4] Gadagkar R. How to Design Experiments in Animal Behaviour: 5. How Do Ants Estimate the Distance Walked?J. Resonance, 2019, 24: 875-889.
[5] CNRS. "The first walking robot that moves without GPS." ScienceDaily. ScienceDaily, 13 February 2019.
[6] TechXplore. "The first walking robot that moves without GPS." 13 February 2019.

出品:科普中國
作者:蘇澄宇(科普創作者)
監制:中國科普博覽











