昆蟲,大自然的「微型機器人」。它們身材小巧,動作靈活,能鉆能爬,去哪兒都不在話下。科學家們早就想:要是能造出像昆蟲一樣靈活的機器人該有多好。但受限於現有的微型驅動技術,人造機器昆蟲總是力不從心,要麽速度慢,要麽載重差,甚至連穩定的方向控制都成問題。
不過,來自北京航空航天大學的科研團隊最近帶來了好訊息,他們發明了一種全新的微型仿生驅動系統,不僅能量利用效率高,而且能精準控制機器人的運動。有了這個「黑科技」,他們打造出了一款跑得比「小強」還快、還穩的機器昆蟲「BHMbot」,這項研究已於近日發表在【自然-通訊】雜誌上。

機器「小強」定妝照(圖片來源:參考文獻1)
身懷絕技的 BHMbot
這只 BHMbot 雖然只有 2 厘米長、1.76 克重,但它可不是空心的。它的身上整合了能源、控制、通訊、傳感等多個模組,是一台貨真價實的微型機器人。而最關鍵的是它腿上裝備的特制動力系統。
與傳統的旋轉式電機不同,BHMbot 采用了一種直線式電機作為驅動。直線電動機(linear motor,又稱線性電動機、線型電動機,)是電動機的一種,其原理是直接把輸入電力轉化為線性動能,與傳統的扭力及旋轉動能不同。直線電機本質上是一個電磁鐵,通電後會產生往復振動。在微小尺度下,這種結構更容易加工和控制。但振動本身並不能直接帶動機器人行走,還需要一個「變速箱」將振動轉化為步態運動。
科研團隊受到昆蟲腿部關節的啟發,設計了一組柔性鉸鏈傳動裝置。鉸鏈的一端連線電機,另一端連線機器人的腿部。當電機振動時,鉸鏈會產生彈性形變,帶動腿部揮動。同時,機器人的軀幹也會隨之產生共振,像彈簧一樣蓄勢助跑。

鉸鏈傳動裝置示意圖(圖片來源:參考文獻1)
透過精心設計鉸鏈的剛柔度和腿部的擺動頻率,研究人員實作了這種柔性傳動系統與機器人身體的共振耦合,大大提高了機器人的運動效率。
這種「直線驅動+柔性傳動」的組合,堪稱昆蟲機器人的「超級動力系統」。它巧妙地避開了傳統旋轉電機在微型化中的種種局限,又透過仿生結構實作了能量的高效利用。測試顯示,這種新型驅動系統的效率可以達到 20% 以上,遠高於毫米級傳統電機的水平。
於是乎,這個小不點就有了驚人的「腳力」。別看它一次只能跳幾毫米,但頻率高啊,這小家夥一秒鐘能跳幾十下,就像上了發條似的,速度可以達到自身長度的 25 倍多!
更神奇的是,這個昆蟲機器人居然還能越「馱」越快 ,給它背上有自身 5 倍多重的「行李」後,它照樣歡快地蹦跶。這得益於它能隨著載重變化,自動調整跳躍的頻率和振幅。在一定範圍內,BHMbot 的速度甚至會隨著載重的增加而提高。
至於方向控制,科學家們也有妙招。 他們在 BHMbot 的兩條腿上分別裝了微型電機,透過巧妙調節兩條腿的運動頻率差,就能操控機器人轉向。就像兩個輪子轉速不同,車子就會拐彎一樣。這樣一來,無需復雜的機械結構,只用兩個驅動器就能讓 BHMbot 隨心所欲地「遛彎兒」了。這種控制方法的靈感同樣來自昆蟲,昆蟲就是透過控制左右兩側肢體的運動頻率差,來調節行進方向的。
無限可能——BHMbot 的未來
有了這些「絕活兒」,BHMbot 簡直是昆蟲界的「超級玩家」。給它編個程式,它就能按計劃跑出圓形、矩形,甚至寫出「BUAA」(北京航空航天大學的縮寫)的字樣。而透過手機遙控,它還能靈活地避開障礙。這麽能跑能跳的小機器人,用途可就多了。
比如,它可以穿過廢墟,去震後現場搜尋幸存者。 研究人員已經做了模擬實驗,讓 BHMbot 在復雜環境中穿行,並成功辨識出受困人員發出的求救訊號。又比如,這小家夥還能給飛機「體檢」。它身材小,跑得穩,正適合鉆入發動機等狹窄部位,近距離勘察可能出現的損傷。
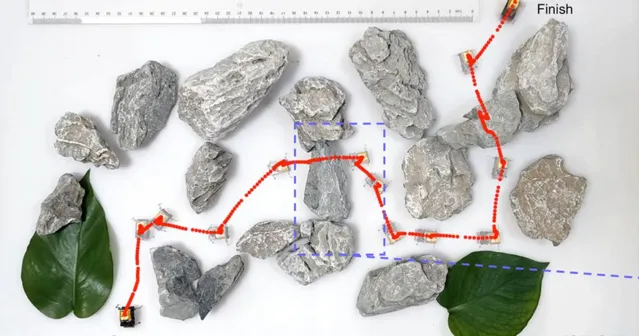
BHMbot 穿越廢墟的模擬實驗(圖片來源:參考文獻1)
從本質上說,BHMbot 的技術原理是實作了微小尺度下能量轉換與運動控制的高度耦合與最佳化。一方面,直線驅動和柔性傳動的巧妙結合在結構設計上找到了電機輸出和機器人運動的最佳「頻率」。另一方面,這種結構還能根據不同的載重和環境需求,自適應地調整驅動參數,使輸出力矩始終與負載阻抗實作「阻抗匹配」,保證能量利用的最優狀態。
這項研究的意義,不僅在於造出了一只跑得快、跳得高,還特別能「背」的機器小強,更在於它所采用的微型驅動和控制技術,為昆蟲機器人的設計開辟了新途徑。這種輕巧、靈活、高效的驅動形式,有望在微型機器人領域帶來一場革命。
向大自然汲取靈感的
仿生機電科學
縱觀 BHMbot 的研發歷程,我們不難發現一個貫穿人類文明史的思想內核——向大自然學習,從生物體的精巧結構中汲取靈感,並將其與尖端制造技術相結合,去創造出更高效、更智能的機器。這種仿生學與機器人學的交叉融合,正是當前機器人領域的重要發展方向。
生物前進演化了數億年才鑄就了昆蟲的「完美」形體,而工程師們如今正試圖用最先進的科學技術,去重現這種「完美」。這是一條充滿挑戰,但也充滿想象力的道路。

用廢棄零件制成的蜘蛛機器人(圖片來源:veer 圖庫)
從蒸汽機到電動機,從家用電器到數控機床,機器的前進演化史就是一部動力系統的前進演化史。如今,隨著 BHMbot 等微型機器人的出現,這種前進演化正在向微觀尺度延伸。它預示著,我們終有一天能造出媲美甚至超越昆蟲的「微型工人」,打造由無數智能微型機器人組成的世界,它們或協同,或自治,執行著各種精細而復雜的任務,服務於人類社會的方方面面。
目前,這個夢想還停留在科幻的想象中,但 BHMbot 的誕生或許已經邁出了關鍵的第一步。這項突破性的研究,展現了昆蟲機器人領域的巨大潛力,也為微型動力系統和控制技術指明了新的方向。它帶給我們的,不僅是技術上的驚喜,更是對微觀世界的新想象。
我們相信,隨著越來越多的科學家投身到這一領域,仿生微型機器人必將在不遠的未來,成為推動科技革命的重要力量。讓我們拭目以待,期待這些機械「昆蟲」創造更多奇跡。

為人類工作的機器昆蟲團隊(想象圖)(圖片來源:AI 合成)
參考文獻
[1]Liu, Z., Zhan, W., Liu, X. et al. A wireless controlled robotic insect with ultrafast untethered running speeds. Nat Commun 15, 3815 (2024).
[2]北京航空航天大學新聞網.【Nature Communications】刊發北航閆曉軍教授團隊在機器昆蟲方面的最新研究成果
策劃制作
來源丨科普中國
作者丨李瑞(全日精英高校聯盟)
監制丨中國科普博覽
責編丨王夢如
審校丨徐來 林林











