
2015年7月晚些時候,在某軍民融合展的「南團」展台出現了1台采用REEV架構+鏈條傳動系統+6輪驅動系統為載具,5組毫米波雷+多組影片元件為環境感知上裝的2代山貓高機動載具原型車。
實際上,在此後的相當一段時間,筆者一直都沒有將這台嘉陵工業制造的無人作戰車輛與山貓高機動車族進行過任何關聯。
但是,在最近翻看相關素材時,才發現這台嘉陵系REEV架構+6輪驅動無人作戰車輛,幾乎就是采用同樣REEV架構的2代山貓原型車。

新能源情報分析網評測組,透過對嘉陵工業REEV架構+6輪驅動+無人作戰系統的2代山貓原型車技戰術優勢,展開全向研讀和判定。
備註:文中涉及的技術、參數和特征,以嘉陵工業官方釋出資訊為準

在2015年7月份這個展會上的官方展板就清晰的標註出,這台REEV系統6輪驅動無人作戰車輛所采用的「雙電機差速轉向」架構,全電驅動裏程超20公裏和油電混合驅動裏程超200公裏的重要參數。
有意思的是,在此後多年間筆者一直尋求多方獲取2代山貓的驅動和轉向結構的設定狀態。但是沒成想,很早就拍攝並記錄了這台REEV架構無人作戰原型車,即2代山貓原型車的諸多核心技術設定。

對於雙電機差速轉向架構,就必須要與這台無人作戰車輛的REEV架構進行關聯解讀。
紅色區域:REEV動力總成中的發動機
藍色區域:REEV動力總成中的ISG啟發電一體機
白色區域:動力電池總成
紅色區域:第2驅動橋的2組輪邊電機
藍色箭頭:REEV動力總成輸出的電量至第2驅動橋的2組輪邊電機
白色箭頭:動力電池總成輸出的電量至第2驅動橋的2組輪邊電機
紅色箭頭:第2驅動橋的輪邊電機透過2組鏈條,將扭矩分配至第1、3驅動橋的2組轉向節,達成全時6輪驅動的設定
需要註意的是(1),透過交叉對比官方資料和同樣使用REEV架構的3代山貓高機動車族技術狀態,基本上可以確認這台REEV架構無人作戰車輛-2代山貓原型車的驅動結構狀態 。 透過2+2組鏈條,僅配置2組輪邊電驅動系統,即可達成全時6輪驅動的技術優勢,和雙電機(第2驅動橋2組輪邊電機)差速轉向設定的達成。

上圖為傳統動力系統後置的1代山貓6(3+3)組鏈條傳動系統工作流程及鏈條傳動技術細節特寫(官方影片截圖)。
這款6輪驅動無人作戰車輛(2代山貓原型車)的REEV動力系統大概率為前橫置,當然也不排除為後置(1代山貓傳統動力系統為後置),2組輪邊電機設定在1、2、3驅動橋的可能性都是存在的。
需要註意的是(2),透過4組鏈條將扭矩傳遞至其他2套驅動橋,特別是在進行零半徑原地差速轉向動作時,受整車自重和輪胎摩擦雙重因素作用,傳輸扭矩至輪端的鏈條所承受的壓力非常大。長時間高強度機動,鏈條元件或被拉伸、或者幹脆容易斷裂。

第2驅動橋2組輪邊電機獲得來自REEV動力總成(或動力電池總成)輸出的不同扭矩:一側3組驅動輪大幅向前或倒退、一側3組驅動輪小幅向前或倒退,達成小半徑差速轉向;
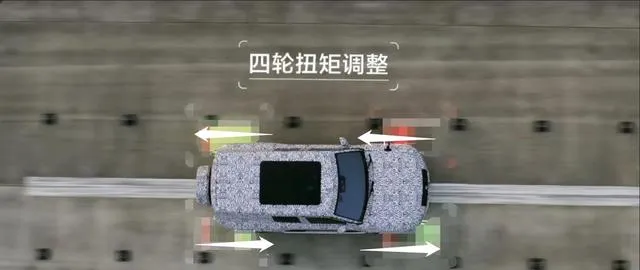
第2驅動橋2組輪邊電機獲得來自REEV動力總成(或動力電池總成)輸出的正反兩組相同扭矩:1側3組驅動輪向前,一側3組驅動輪向後,達成零半徑差速轉向、即「坦克掉頭」;

從官方釋出的官方釋出的宣傳圖可見,這台2代山貓原型車的環境感知上裝擁有2組4G導航天線(黑色箭頭)、1組激光雷達(綠色箭頭)、2組長焦段白光影片采集系統(藍色箭頭)、3組帶自補光和外置輔助照明的近視場白光影片采集系統(白色箭頭)以及5組毫米波雷達(紅色箭頭)。

從官方釋出的官方釋出的宣傳影片可見,這台這台2代山貓原型車處於無人駕駛狀態遂行補給轉運戰術,並且包括激光雷達(機械式)毫米波雷達以及影片采集系統安裝完備。
需要註意的是(3),在「南團」展台上的2代山貓原型車除了頂置激光雷達,其他的環境感知器材全都配置完備。尤其是正前、正左和正右設定的毫米波雷達(紅色箭頭),可以近距離辨識品牌和型號。

紅色區域:設定激光雷達的支架
紅色箭頭:正前、正左和正右配置的近視場白光影片采集系統,各搭配了內建和外置2組補光燈
至於實物展車沒有配置激光雷達的原因,不得其解。根據官方宣傳圖片和影片中的技術狀態,大概率可以確認2代山貓原型車配置的激光雷達為機械式360度掃描成像。
雖然這種機械式激光雷達的掃描成像效率以2024年標準看十分落後,但是與毫米波雷達滿足了不依賴高精度地圖的中遠端無人駕駛需求。與全向遠近視場白光影片采集系統關聯,還可以用來滿足有人遠端操控的初級無人作戰(後勤補給、傷員轉運)需求。
需要註意的是(4),這款2代山貓原型車的遠端有人操控的設定,是透過4G傳輸數據達成。盡管4G網絡對於指令的發出和動作執行存在一定的「時間差」,卻補齊了無人作戰和有人操控雙重甬冗的「有五」問題。

嗯。。。。。2代山貓原型車的輪胎尺寸AT27x1X-1X,純粹是一種以復雜路況為需求的設定,只不過因為沒有減震系統使得整車舒適性完全依靠輪胎緩沖得以解決。

這台2代山貓原型車用無人作戰來描述其功能是準確且正確的,只不過遂行的戰術更多的強調透過無人駕駛與遠端操控、甚至是應急有人駕駛,來達成運輸為主的作戰任務。該型裝備的後部平台十分平整,且設定系留用格柵,這也從功能性設定狀態,可以印證其遂行的戰術範圍。

從官方釋出的官方釋出的宣傳影片可見,拖載作戰物資的2代山貓原型車以無人行駛的模式遂行保障任務,尤其是在沒有分道線的復雜路況,依托環境感知上裝展開自主搜尋(軌跡)、制定(策略)並執行(決策)等一系列動作。
我們的征途是星辰大海!
在2015年早些時候,嘉陵工業就完成了基於REEV架構的融合激光雷達、毫米波雷達和影片采集系統進行融合的無人作戰系統的測試和套用,放眼全球範圍都是屬於「炸裂」一般的存在。最難的是的,這款無人作戰系統經過持續研發和改進,竟然出成為一款成熟的軍用裝備-2代山貓高機動車族批次使用。

不過,鑒於2代山貓原型車立項、研發、試制和測試所需要X年周期的這一實質性存在,所匹配的ISG啟發電一體機、2組輪邊電機、動力電池系統以及整車電動化控制策略,也只能在相對小範圍內選擇可靠分系統來整合套用。當然,也不排除嘉陵工業直接「下場」,對這款無人作戰裝備使用的「3電」系統進行全域自研和量產的可能。

令人振奮的是!使用傳統動力的1代山貓的量產,並未影響使用REEV架構的2代山貓,甚至為了應對更大的空間和更高的載荷,3代山貓使用了新狀態的REEV架構和更先進的全輪邊電機驅動設定。
尤其是在2014年-2024年間,中國新能源產業鏈全速激增的時代,套用「1槽6\8\10線」扁線繞組技術的啟發電機和驅動電機,針對特種套用的磷酸忒李動力電池系統甚至全域超600伏額定電壓平台方案,都可以在第一時間從民用牽引至軍用領域,直接降低全新特種電動化載具及作戰系統研發周期、成本和風險!
關於山貓高機動車族的報道未完待續。。。。
新能源情報分析網評測組出品











